Robots that
see and feel.
Sensate Robotics™ builds multi-modal tactile sensors and robotic gripping systems that give machines a true sense of touch. We automate the work where irregular objects, quality judgment, and delicate handling meet a hard labor constraint. Our debut is in fruit handling, where the need is urgent and the work still depends on human hands. The same technology reaches every industry where touch is the missing input.



THE PROBLEM
The industry has robots. What it doesn't have is robots that can feel.
A camera can see an object, but it cannot tell whether that object will bruise, slip, or break under contact. You wouldn't pick an avocado by pointing at it, you would pick it up and feel it. That is why the delicate, irregular, high-judgment work still depends on human hands, even as that labor gets harder and more expensive to find. Tactile sensing is the missing input. A robot that can feel pressure, slip, and texture at the point of contact is a robot that can finally do the work vision alone cannot.
THE SOLUTION
Quality through contact. Not just sight.
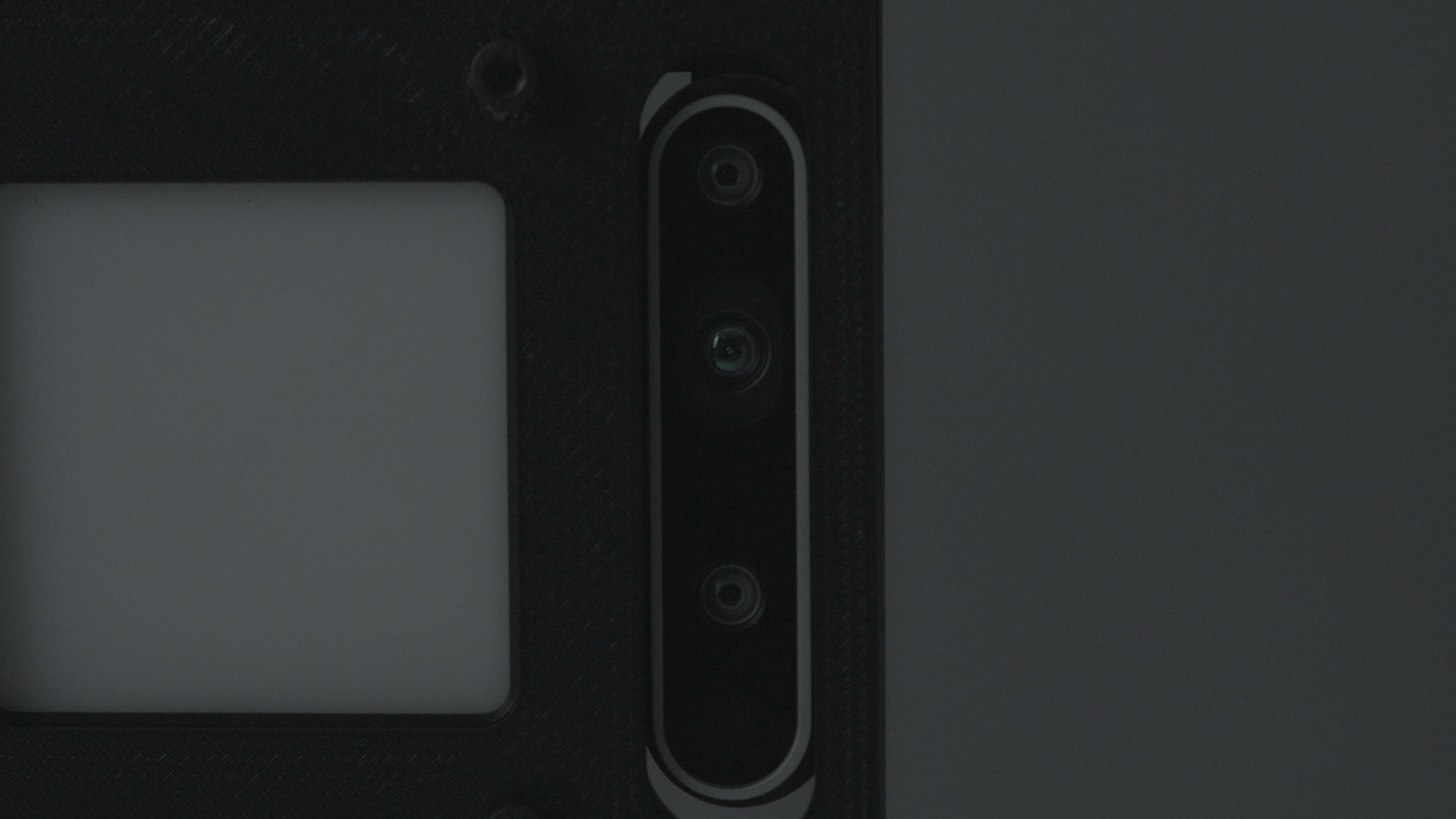
The Sensate System is a drop-in robotic cell that fuses optical tactile sensing, structured-light vision, and edge AI into a single deployable platform. Three products, designed to compose. The PolySkin™ sensor at the contact surface, the Sensate Gripper™ at the end-effector, and the Pick-E™ Sorter as the complete handling system.


PROVEN ECONOMICS
What a single cell delivers.
Modeled for avocado inspection and packaging, running around the clock.
Each line runs as many cells as its volume needs. The same hardware platform extends to apples and a roadmap of additional crops. These figures are modeled from our customer discovery work. See the pilot program for how we partner with growers and packers.
Giving machines their final missing sense.
Pilot deployments, partnerships, and investment inquiries welcome.